Where shots go relative to keepers
I will make use of statsbomb data to see which shots get saved by the keeper dependin on the shot placement relative to the keeper.
from statsbombpy import sb
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
free_comps = sb.competitions()
# wc_matches = sb.matches(competition_id=9, season_id=281)
# bl_matches = sb.matches(competition_id=9, season_id=281)
#euro24
eu_matches = sb.matches(competition_id=55, season_id=282)
C:\Users\gaut\AppData\Local\Programs\Python\Python312\Lib\site-packages\statsbombpy\api_client.py:21: NoAuthWarning: credentials were not supplied. open data access only
warnings.warn(
# with pd.option_context('display.max_rows', None):
# display(free_comps)
large_shot_set = pd.concat(
[
sb.events(match_id=match_id, split=True)["shots"]
for match_id in eu_matches["match_id"]
],
axis=0,
ignore_index=True
)
large_gk_set = pd.concat(
[
sb.events(match_id=match_id, split=True)["goal_keepers"]
for match_id in eu_matches["match_id"]
],
axis=0,
ignore_index=True
)
C:\Users\gaut\AppData\Local\Programs\Python\Python312\Lib\site-packages\statsbombpy\api_client.py:21: NoAuthWarning: credentials were not supplied. open data access only
warnings.warn(
C:\Users\gaut\AppData\Local\Programs\Python\Python312\Lib\site-packages\statsbombpy\api_client.py:21: NoAuthWarning: credentials were not supplied. open data access only
warnings.warn(
gk_events = large_gk_set.set_index("id")
gk_events = gk_events[[
"player_id",
"player",
"timestamp",
"location",
"goalkeeper_body_part",
"goalkeeper_outcome",
"goalkeeper_technique",
"goalkeeper_position"
]].rename(columns={
"player_id": "keeper_id",
"player": "keeper_name",
"timestamp": "gk_timestamp",
"location": "gk_location",
})
shot_events = large_shot_set[[
"timestamp",
"shot_technique",
"location",
"related_events",
"shot_outcome",
"shot_end_location",
"shot_body_part"
]].rename(columns={
"timestamp": "shot_timestamp",
"location": "shooter_location",
})
shots_and_gks = pd.merge(
gk_events,
shot_events.explode("related_events"),
how="inner",
left_on="id",
right_on="related_events"
).groupby("related_events").first().reset_index(drop=True)
def shot_relative_to_gk(shot_start, shot_end, gk_position):
flipping = np.array([120, 80])
sef = flipping - shot_end
ssf = flipping - shot_start
k_to_e = sef - gk_position
k_to_s = ssf - gk_position
s_to_e = sef - ssf
# distance along shot keeper attempts block
daskab = (
np.sum(np.square(s_to_e))
+ np.sum(np.square(k_to_s))
- np.sum(np.square(k_to_e))
) / (2 * np.sum(np.square(s_to_e)))
gk_interacts_at = daskab * s_to_e + ssf
srk = gk_interacts_at - gk_position
distance = np.linalg.norm(srk)
directed_distance = distance * np.sign(srk[1])
return directed_distance
shot_relative_to_gk(
np.array([100, 40]),
np.array([120, 45]),
np.array([1, 40])
)
-4.608176875690325
shots_and_gks["shot_end_location_2D"] = shots_and_gks["shot_end_location"].map(
lambda l: l[:2]
)
shots_and_gks["shot_end_height"] = shots_and_gks["shot_end_location"].map(
lambda l: l[2] if len(l) > 2 else pd.NA
)
shots_and_gks[
["shooter_location",
"shot_end_location_2D",
"gk_location"]
] = shots_and_gks[[
"shooter_location",
"shot_end_location_2D",
"gk_location"]].apply(np.array)
shots_and_gks["shot_relative_to_gk"] = shots_and_gks.apply(
lambda row: shot_relative_to_gk(
row["shooter_location"],
row["shot_end_location_2D"],
row["gk_location"]
),
axis='columns'
)
shots_and_gks["goal_numeric"] = shots_and_gks.apply(
lambda r: 1.0 if r["shot_outcome"] == "Goal" else 0.0,
axis='columns'
)
gk_faces = shots_and_gks[
(
shots_and_gks["shot_outcome"] == "Goal"
) | (
shots_and_gks["shot_outcome"] == "Saved"
)
].copy()
keeper_ids = large_gk_set.groupby("player_id").first()["player"]
keeper_ids
player_id
3468 Jordan Pickford
3711 Martin Dúbravka
3761 Mike Maignan
3815 Kasper Schmeichel
4127 David Raya Martin
5550 Yann Sommer
5570 Manuel Neuer
5669 Wojciech Szczęsny
6378 Jan Oblak
7036 Gianluigi Donnarumma
7789 Thomas Strakosha
8240 Koen Casteels
8524 Péter Gulácsi
9731 Patrick Pentz
11508 Łukasz Skorupski
11748 Unai Simón Mendibil
15731 Predrag Rajković
16531 Dominik Livaković
21390 Andriy Lunin
22379 Angus Gunn
28040 Jindřich Staněk
28242 Florin Constantin Niţă
30310 Fehmi Mert Günok
30442 Altay Bayındır
32975 Diogo Meireles Costa
37274 Bart Verbruggen
37330 Anatolii Trubin
46046 Matěj Kovář
102371 Giorgi Mamardashvili
Name: player, dtype: object
PICKFORD_ID = 3468
SOMMER_ID = 5550
SIMON_ID = 11748
RAYA_ID = 4127
MAMARDASHVILLI_ID = 102371
CASTEELS_ID = 8240
GK_COLOURS = {
"Goal": "black",
"Both Hands": "coral",
"Left Hand": "red",
"Right Hand": "gold",
"Right Foot": "green",
"Left Foot": "blue",
"Head": "pink",
"Chest": "purple"
}
our_gk_id = PICKFORD_ID
our_gk_name = keeper_ids.loc[our_gk_id]
our_gk_faces = gk_faces[gk_faces["keeper_id"] == our_gk_id]
def graph_gk(ax, the_gk_faces, the_gk_name, legend=False):
ax.spines["left"].set_position("zero");
ax.spines["right"].set_position("zero");
ax.spines["top"].set_color("none");
grouped_saves = the_gk_faces[
the_gk_faces["shot_outcome"] == "Saved"
].groupby("goalkeeper_body_part")
for part, shots in grouped_saves:
ax.scatter(
shots["shot_relative_to_gk"],
shots["shot_end_height"],
marker='x',
c=GK_COLOURS[part],
label=f"Saved by {part}",
);
goals = the_gk_faces[the_gk_faces["shot_outcome"] == "Goal"]
ax.scatter(
goals["shot_relative_to_gk"],
goals["shot_end_height"],
marker='o',
c=GK_COLOURS["Goal"],
label="Goal"
);
ax.set_title(f"Shots faced by {the_gk_name}");
if legend:
ax.legend(
loc="center",
bbox_to_anchor=(0.5, -0.3)
);
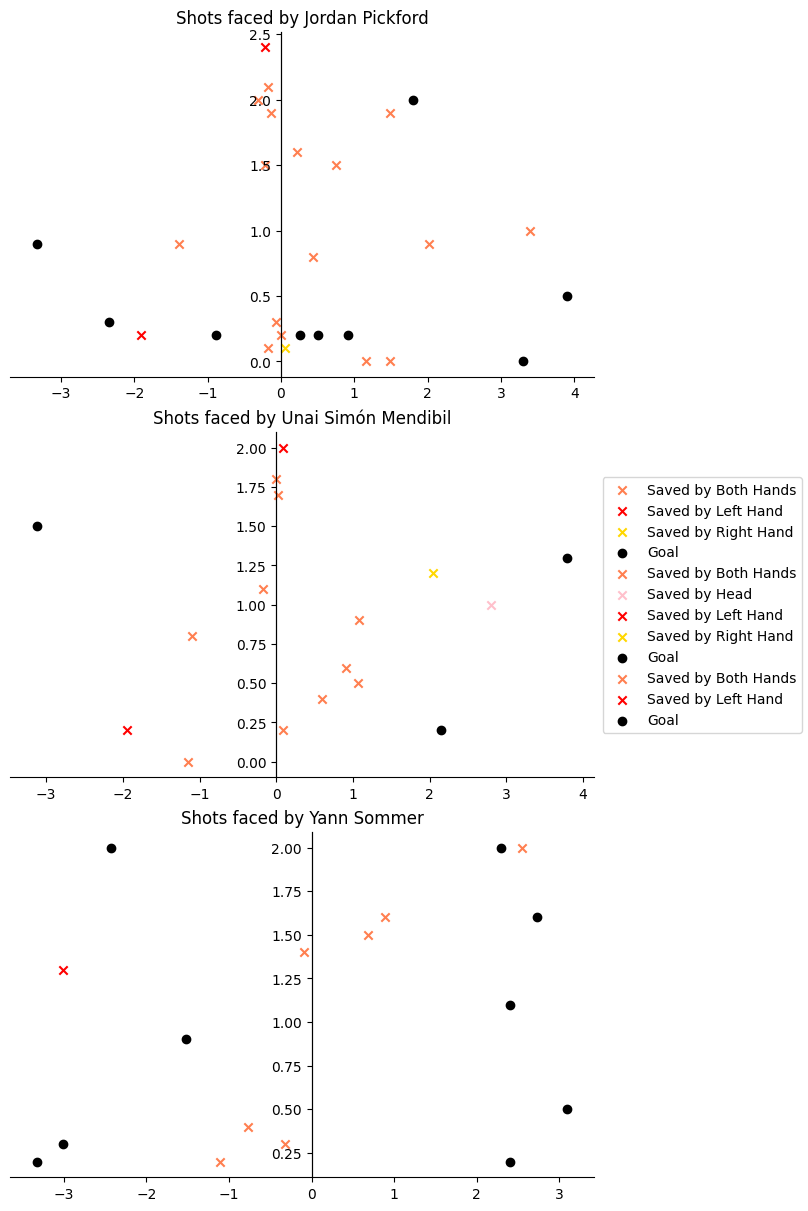
Keeper maps
Here are maps of shots and goals against some keepers from the perspective of the keeper looking at the striker. The body part the save was made with is shown by colour.
our_keepers = [PICKFORD_ID, SIMON_ID, SOMMER_ID]
fig, axs = plt.subplots(
nrows=len(our_keepers),
figsize=(8, 4*len(our_keepers)),
layout="constrained"
)
for i, the_gk_id in enumerate(our_keepers):
the_gk_name = keeper_ids.loc[the_gk_id]
the_gk_faces = gk_faces[gk_faces["keeper_id"] == the_gk_id]
graph_gk(axs[i], the_gk_faces, the_gk_name, legend=False)
# print(labels_handles)
fig.legend(loc="outside right");
Scoring rates in quadrants
def partition_shot_quadrants(across, height):
hc = "high" if height > 0.9 else "low"
ac = "right" if across > 0.0 else "left"
return (hc + " " + ac)
gk_faces["quadrant"] = gk_faces.apply(
lambda r: partition_shot_quadrants(
r["shot_relative_to_gk"],
r["shot_end_height"]
),
axis='columns'
)
keepers_in_quadrants = gk_faces.groupby(["keeper_id", "quadrant"]).agg(
total=("goal_numeric", "count"),
goals=("goal_numeric", "sum")
)
keepers_in_quadrants["quadrant_save_rate"] = 1 - (
keepers_in_quadrants["goals"] / keepers_in_quadrants["total"])
quad_totals = keepers_in_quadrants.unstack(level="quadrant")["total"]
quad_goals = keepers_in_quadrants.unstack(level="quadrant")["goals"]
quad_goals.sum(axis=0) / quad_totals.sum(axis=0)
quadrant
high left 0.220183
high right 0.321839
low left 0.266667
low right 0.333333
dtype: float64
Keepers concede less on their left side.
quad_totals.sum(axis=0)
The shots keepers face are about even between right and left.
quadrant
high left 109.0
high right 87.0
low left 120.0
low right 126.0
dtype: float64